Biography
Deyang Lin is an enrolled graduate student at Jilin University. He is currently on a leave of absence to co-found a robotics studio with his friends, primarily dedicated to designing robots for educational purposes and competitions. Within the studio, he assumes the role of a versatile robotics design engineer, exhibiting an unwavering passion for robotics. He possesses the ability to independently conceptualize, construct, and control the hardware and software systems of complex robots. Simultaneously, he ensures that the studio’s products maintain a competitive edge in the market, both in terms of performance and pricing.
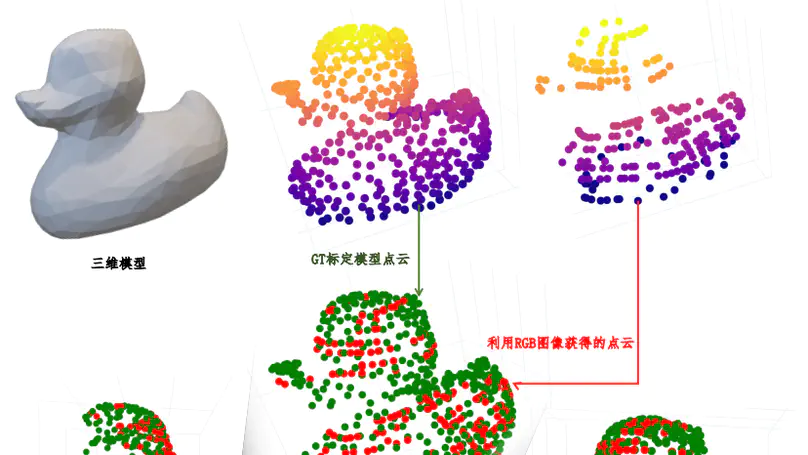
Academically, his research endeavors predominantly revolve around the field of point cloud perception. Presently, he is diligently striving to overcome the challenges associated with fusing perception from 2D images and 3D point clouds, thereby propelling the prospects of practical implementation of point cloud perception.
- Point Cloud Perception
- Control Theory And Implementation
- Robot Design
- Entrepreneurship
-
B.E. in Automation, 2022
Guangdong University of Technology
-
The current graduate student in the field of Mechanical and Aerospace Engineering, but took a leave of absence to start a startup., 2022
Jilin University
Skills
Fusion360, CNC, 3D Print, LCEDA
OpenPCDet, ROS, Gazebo, Pytorch
C++, Python, Git, LaTeX, Unity
Projects



Publications
Experience
Responsibilities include:
- Complete the design of the robot’s hardware and software.
- By employing outstanding software development, the studio ensures sufficient market competitiveness while utilizing equivalent hardware for its robots.
- Implementation and realization of dynamic visual design and perception detection for interactive art projects.
Responsibilities include:
- I have constructed a Docker-based development environment for ROS1/ROS2 and created a Docker image for ROS Bridge, enabling the potential for edge devices (such as Jetson AGX Xavier) to utilize both ROS1 and ROS2 concurrently.
- Accomplished the data conversion based on Livox LiDAR and PointPillar algorithm (using Livox Dataset), training, and forward inference implementation (with ROS bags collected from real industrial environments in mining areas). This enabled the identification of truck targets within point clouds, laying the foundation for precise recognition of truck dumping poses in the next step.
- Completed my graduation thesis, which primarily involved utilizing RGB images and CAD models of detected objects in the images to determine the poses of the detected objects relative to the camera coordinate system.
Under my father’s influence, I developed a keen interest in mechanical and electrical design, and my self-taught nature from a young age allowed me to independently complete the following projects:
- (Middle school)Constructed a crane that can be controlled using a joystick remote. This Arduino-based project earned me a second prize on the Geekfans website.
- (High school)Designed a device that can securely attach multiple infrared detection probes to the underside of a vehicle. This device is used to detect animals underneath the vehicle, and it wirelessly consolidates the detection signals, transmitting them to an onboard receiving and display device. The project received a third prize in the provincial youth science and technology competition.
- (High school)Designed a helmet to detect whether the driver is wearing it properly while driving. If the helmet is not worn correctly, it emits an alarm or disables the vehicle’s ignition button. This project received a second prize in the provincial youth science and technology competition.